Multi-product formulas (MPF)
Mga bersyon ng package
Ang code sa pahinang ito ay binuo gamit ang mga sumusunod na kinakailangan. Inirerekomenda naming gamitin ang mga bersyong ito o mas bago pa.
Ang multi-product formulas (MPF) ay maaaring gamitin upang mas tumpak na i-simulate ang dynamics ng isang quantum system, ngunit kailangan ng mas maraming circuit executions. Ito ay isang post-processing technique na nagbabawas ng error ng expectation values para sa mga time-evolved na estado.
Ginagamit ang classical computing upang malutas ng isang sistema ng linear equations na nagbibigay ng mga coefficient sa isang weighted na kombinasyon ng ilang circuit executions. Ang paggamit ng weighted na kombinasyong ito ay maaaring magbawas ng error na nauugnay sa pag-simulate ng time evolution, kapag maayos ang pagpili ng Trotter steps. Ang MPF tool ay tatanggap ng isang seleksyon ng data --- kasama na ang bilang ng Trotter steps at ang order ng Trotter approximation --- upang ihanda at malutas (o i-approximate ang solusyon ng) ang nauugnay na sistema ng linear equations, na maaari mong gamitin sa post-processing ng expectation value measurements ng isang time-evolved na estado.
I-install ang MPF package
May dalawang paraan para i-install ang MPF package: sa pamamagitan ng PyPI at sa pamamagitan ng pagbuo mula sa source. Inirerekomenda na mag-install sa isang virtual environment upang matiyak ang paghihiwalay ng mga package dependency.
I-install mula sa PyPI
Ang pinakamadaling paraan para i-install ang qiskit-addon-mpf package ay sa pamamagitan ng PyPI.
pip install qiskit-addon-mpf
Buuin mula sa source
Ang mga user na nais mag-develop sa repository o gustong i-install ito nang manu-mano ay maaaring gawin ito sa pamamagitan ng pag-clone muna ng repository:
git clone git@github.com:Qiskit/qiskit-addon-mpf.git
at i-install ang package sa pamamagitan ng pip. Ang repository ay naglalaman din ng ilang opsyonal na dependency na nagbibigay-daan sa ilang partikular na feature.
I-adjust ang mga opsyon ayon sa iyong pangangailangan.
pip install tox notebook -e '.[notebook-dependencies,dev]'
Teoretikal na background
Ang mga MPF ay maaaring magbawas ng Trotter approximation error na nauugnay sa pag-simulate ng dynamics ng quantum systems sa pamamagitan ng isang weighted na kombinasyon ng ilang circuit executions. Ang weighted sum na ito ay tinukoy bilang:
kung saan ang ay ang mga weighting coefficient, ang ay ang density matrix na naaayon sa pure state na nakuha sa pamamagitan ng pag-evolve ng initial state gamit ang isang product formula na na nag-a-approximate ng time-evolution operator gamit ang na Trotter steps, at ang ay nag-iindex sa bawat product formula na ginagamit sa sum.
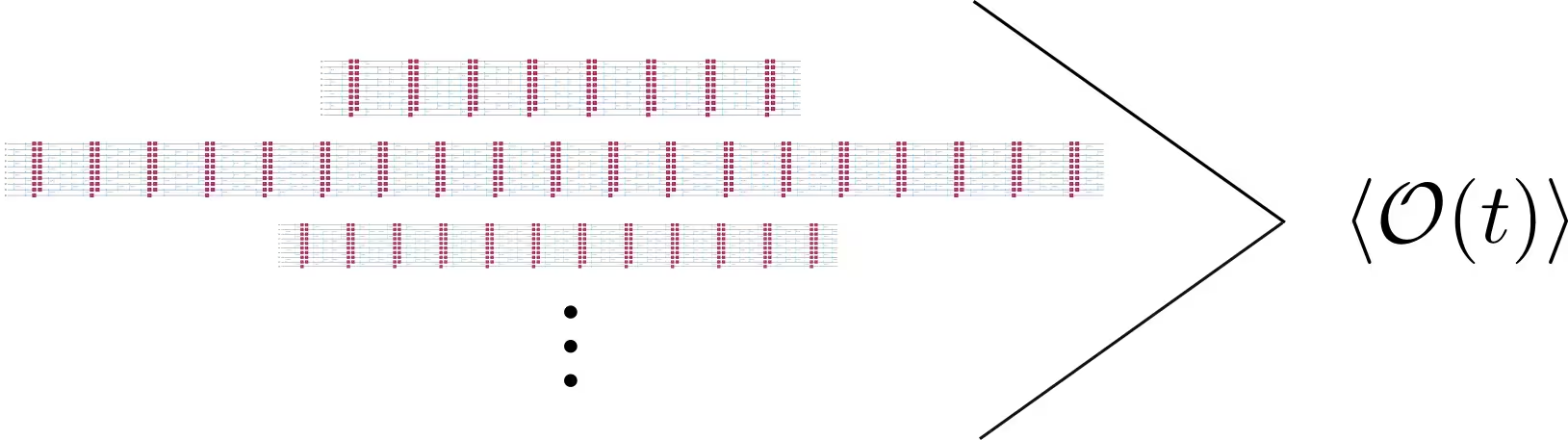
Sa pangkalahatan, ang layunin ng pag-simulate ng quantum dynamics ay ang sukatin ang isang observable na , na isang function ng oras. Kapag gumagamit ng mga MPF, maraming circuit --- bawat isa ay gumagamit ng na Trotter steps --- ang isinasagawa upang makakuha ng ilang sukat ng target observable na . Ang sukat ng target observable ay pagkatapos ay nakuha sa pamamagitan ng pag-compute ng:
Sa esensya, mababawasan mo ang kabuuang Trotter error sa pamamagitan ng pag-approximate ng time-evolution operator gamit ang ilang product formula na may iba't ibang bilang ng Trotter steps sa halip na isang product formula lang. Gumagawa ka ng circuit para sa bawat term sa weighted sum, na nag-e-evolve ng sistema ayon sa bawat isa sa na bilang ng Trotter steps. Ang bawat circuit ay pagkatapos ay isinasagawa nang hiwalay sa isang QPU upang i-reconstruct ang mga resulta sa isang post-processing step. Ang utility ng technique na ito ay maaaring tingnan mula sa dalawang perspektibo:
- Para sa isang nakapirming bilang ng Trotter steps na isinasagawa mo, maaari kang makakuha ng mga resulta na may mas maliit na Trotter error sa kabuuan.
- Para sa isang bilang ng Trotter steps na nagreresulta sa malalim na circuit, maaari mong gamitin ang MPF upang mahanap ang ilang mas maikling circuit na tatakbuhin, na nagreresulta sa katulad na Trotter approximation error.
Tukuyin ang mga MPF coefficient
Ang pangunahing functionality ng qiskit-addon-mpf package ay nasa pagtukoy ng mga MPF coefficient na (na maaaring depende sa oras). Ang proseso upang makuha ang bawat ay kinabibilangan ng paglutas ng isang sistema ng linear equations na kung saan ang ay ang vector ng mga coefficient na tutukuyin, ang ay isang matrix na depende sa bawat isa sa at ang product formula na ginamit na (iyon ay, ang approximation order at bilang ng Trotter steps), at ang ay isang vector ng mga constraint. Ang sistemang ito ng equations ay maaaring malutas nang eksakto o gamit ang isang approximate model na nagmi-minimize ng 1-norm ng mga coefficient. Bukod pa rito, ang pagpili para sa bawat ay isang heuristic na proseso, ngunit maaaring limitahan ng mga sumusunod na constraint:
- Ang pinakamalaking na halaga ay limitado ng pinakamataas na depth ng circuit na maaaring mapagkakatiwalaang isagawa
- Ang pinakamaliit na ay dapat matugunan ang dahil doon pinaka-maayos ang gawi ng Trotter error
- Wala sa mga coefficient na ang dapat na malapit sa dahil ito ay magpapahiwatig na hindi sila gaanong nag-aambag sa MPF
- Gayundin, ang coefficient na nauugnay sa pinakamalaking na halaga ay hindi dapat mangibabaw, dahil ito ay nagpapahiwatig na gumagamit ka ng isang product formula lang
- Sa wakas, ang norm ng mga coefficient na na nakuha ay dapat na maliit, dahil ito ay nagpapahiwatig ng isang maayos na kondisyon na MPF 1
Susunod na hakbang
- Basahin ang pahina tungkol sa pagsisimula sa MPF.
Mga Sanggunian
- A. Carrera Vazquez, D. J. Egger, D. Ochsner, and S. Wörner, "Well-conditioned multi-product formulas for hardware-friendly Hamiltonian simulation", Quantum 7, 1067 (2023).
- S. Zhuk, N. Robertson, and S. Bravyi, "Trotter error bounds and dynamic multi-product formulas for Hamiltonian simulation", Phys. Rev. Research 6, 033309 (2024).
- N. Robertson, et al. "Tensor Network enhanced Dynamic Multiproduct Formulas", arXiv:2407.17405v2 [quant-ph].